
Unkraut(gift) ade
Intelligenter Roboter mit uEye+ Industriekamera macht den Einsatz von Herbiziden entbehrlich
Pflanzenschutzmittel sind fester Bestandteil der heutigen Landwirtschaft. Sie sollen Nutzpflanzen schützen und Unkräuter bzw. Schädlinge fern halten. Im Jahr 2019 machte die Gruppe der Herbizide (Unkrautbekämpfungsmittel) laut dem deutschen Umweltbundesamt 50,6 % der abgegebenen Pflanzenschutzmittel aus. Leider bergen diese neben der gewünschten Wirkung auch zahlreiche Risiken für Mensch und Umwelt. So gefährden sie Artenvielfalt und Gewässerqualität angrenzender Flächen. Die Biodiversität nimmt ab. Das Studentenprojekt Rowesys ist im Sommer 2019 an der Eidgenössischen Technischen Hochschule (ETH) Zürich mit dem Ziel gestartet, einen Roboter für eine nachhaltigere Landwirtschaft ohne den übermäßigen Einsatz von Herbiziden zu entwickeln. An der Unterseite des Roboters befindet sich eine uEye+ Industriekamera mit GigE Vision Interface der IDS Imaging Development Systems GmbH.
Anwendung
Das Team, bestehend aus zehn Studierenden der Fachrichtungen Elektrotechnik, Maschinenbau und Industrie Design, konstruierte innerhalb von nur neun Monaten einen ersten funktionsfähigen Prototyp mit Namen Rosie. Der Roboter besteht aus einer äußeren Hülle, die alle Komponenten innerhalb des Gehäuses schützt. Im Inneren verfügt er über zwei leistungsstarke Batterien und einen Schaltkasten, der die meisten elektrischen Komponenten des Systems enthält. Eine Struktur aus Aluminiumprofilen bildet das Skelett des Roboters. Mithilfe von vier kleinen, einzeln gefederten Pflugscharen entfernt Rosie Unkraut zwischen den gesäten Pflanzen auf rein mechanische Weise. Sie werden hinter dem Roboter links und rechts von den Pflanzenreihen durch den Boden gezogen. So kann auf den Einsatz umweltschädlicher Herbizide verzichtet werden. Da der Roboter autonom durch das Feld navigiert, reduziert sich der Aufwand für den Landwirt auf ein Minimum. Gleichzeitig ist eine reibungslose, intuitive Steuerung auch über einen Joystick möglich.

Um autonom durch ein Feld navigieren zu können, muss Rosie zunächst die genaue Position sowie das Ende einer Pflanzenreihe wahrnehmen können. Dafür verfügt der Roboter über mehrere Kameras und Sensoren sowie Algorithmen zur Bahn- und Lageerkennung. Basierend auf den daraus gewonnenen Daten bewegt er sich innerhalb des Feldes immer entlang der erkannten Reihe. Ist deren Ende erreicht, wechselt er in den Wendemodus und findet die folgende. Dies geschieht so lange, bis der komplette Acker bearbeitet ist. Dank vier Motoren kann jedes Rad einzeln angesteuert werden. Das macht Rosie sehr beweglich und erlaubt u.a. eine volle Drehung auf der Stelle.
Derzeit arbeitet das Team an der Weiterentwicklung und Optimierung des Systems. Auf dem Plan stehen verschiedene Monitoring Aufgaben. Dabei ist es das Ziel, Pflanzen über einen längeren Zeitraum zu beobachten, um dem Landwirt oder Züchter u.a. Informationen zu deren Wachstumsverhalten zu liefern. Dafür wurde Rosie zusätzlich mit einer robusten IDS Industriekamera bestückt. "Mit Hilfe der Bilder unterscheiden wir für die herbizidfreie Unkrautentfernung zwischen Unkraut und Nutzpflanze." Ein aktives Werkzeug unterhalb des Roboters soll dann Unkraut auch direkt um die Pflanzen herum entfernen können. "Zukünftig sollen auch viele weitere Informationen mit Hilfe intelligenter Bildverarbeitung extrahiert werden - von Daten zur Ertragsabschätzung bis hin zur frühzeitigen Erkennung von Pflanzenkrankheiten", erklärt Timo Schönegg, ETH Zürich - Fokusprojekt Rowesys.
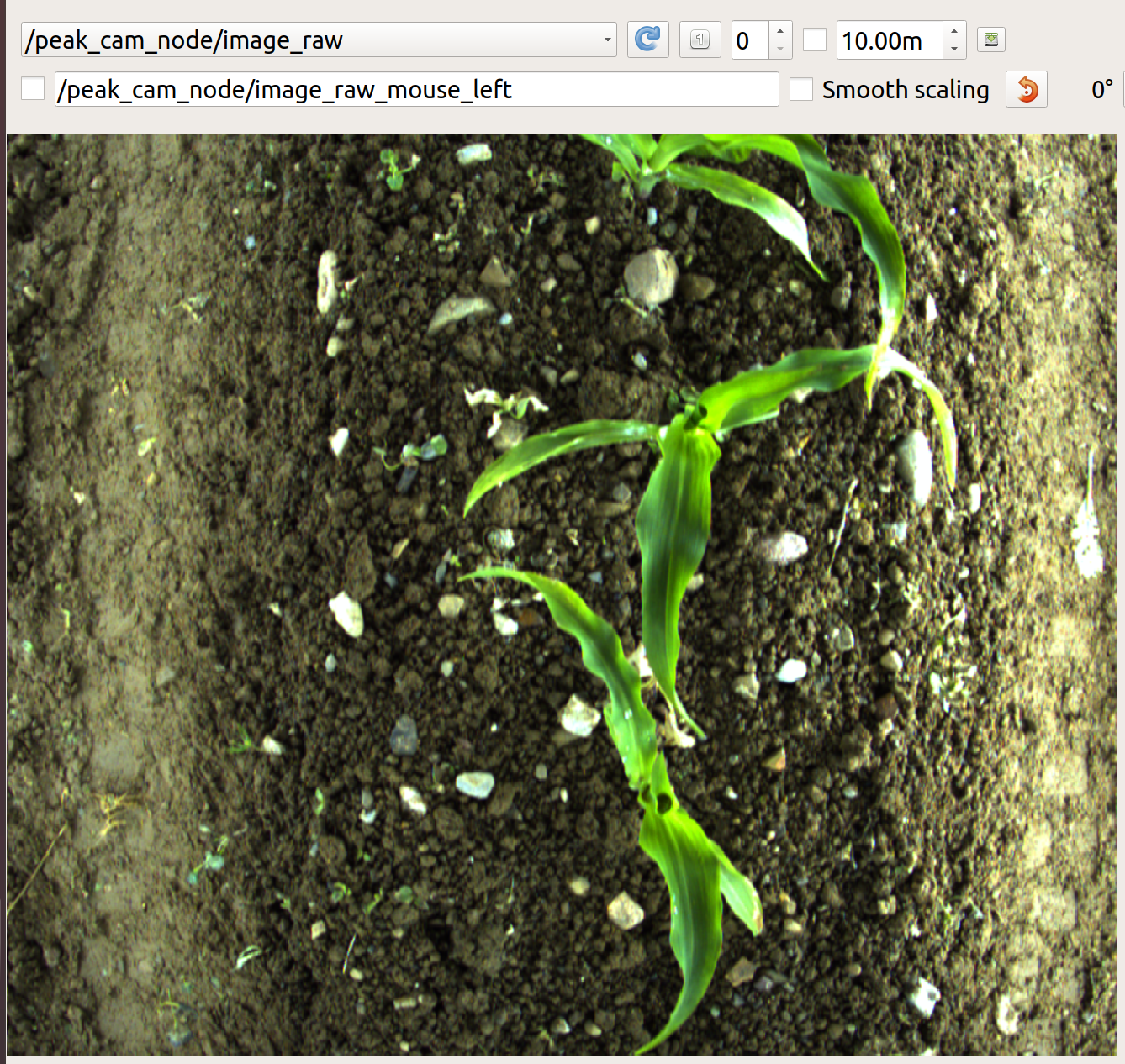
Die Kamera ist an der Unterseite des Roboters montiert und senkrecht nach unten ausgerichtet. Während der Roboter durch die Felder fährt, nimmt sie die Pflanzen von oben auf. Mittels neuronaler Netze können je nach Anwendung die oben genannten Analysen durchgeführt werden. Diese Informationen sollen dann zukünftig Landwirten helfen, frühzeitig Maßnahmen, z.B. gegen Pilzbefall, ergreifen zu können. Rosie war für Feldversuche bisher in Zuckerrüben-, Weizen- und Maisfeldern im Einsatz.
Kamera
Das eingesetzte Kameramodell muss für die Anwendung auf dem Feld besondere Spezifikationen erfüllen. "Für unsere Auswertungen benötigen wir eine Kamera mit einem hochauflösenden Farbsensor und geringer Belichtungszeit für scharfe Bilder, trotz der ständigen Bewegung des Roboters. Da sie je nach Wetterlage auch rauen Bedingungen auf den Feldern ausgesetzt sein kann, muss sie außerdem Staub- und Spritzwasser geschützt sein", erläutert Timo Schönegg. Weitere Auswahlkriterien waren die Kompatibilität mit Linux/ROS, eine kompakte Größe sowie eine schnelle Datenübertragung für kurze Reaktionszeiten. Die Möglichkeit, Weitwinkelobjektive einzusetzen, musste zusätzlich gegeben sein.
Das Team Rowesys hat sich für eine uEye+ vom Typ GV-5040FA-C-HQ entschieden.
Mit der ausgewählten Kamera sind wir sehr zufrieden. Unsere hohen Ansprüche wurden vollumfänglich erfüllt und wir konnten in den vergangenen Monaten viele Daten sammeln, mit denen wir unsere Software weiter trainieren werden.
Das Modell ist Teil der uEye FA Familie, damit besonders widerstandsfähig und dank Schutzart IP65/67 ideal geeignet für anspruchsvolle Umgebungen. Kamerainterne Funktionen wie Pixelvorverarbeitung, LUT oder Gamma reduzieren die benötigte Rechnerleistung auf ein Minimum.

Für ausgezeichnete Bildqualität - auch bei wenig Licht oder Aufnahmen von sich schnell bewegenden Objekten - verfügt die GV-5040FA-C-HQ über den Global-Shutter CMOS-Sensor IMX273 aus der Pregius-Reihe von Sony. Letzterer punktet insbesondere durch Empfindlichkeit und einen hohen Dynamikbereich. Die Auflösung des Sensors beträgt 1,58 MPixel (1456 x 1088 px Pixel) bei einer Framerate von 78,0 fps.
Die Steuerung des Roboters und das Auslesen der Sensoren erfolgt über die Robot Operating System Library ROS in der Programmiersprache C++. Da für die IDS Kamera bereits ein funktionsfähiger ROS Driver existiert, war ihre Integration einfach und mit wenig Aufwand verbunden. Für die weitere Bildverarbeitung verwendet das ETH-Team selbstentwickelte Algorithmen zur oben beschriebenen Unterscheidung zwischen Unkraut und Nutzpflanze. "Machine Learning Algorithmen zur Ertragsabschätzung und Krankheitserkennung mit den jetzt aufgenommenen Daten sind gerade in Planung", so Timo Schönegg.
Ausblick
Landwirtschaftsroboter werden in Zukunft eine immer größere Rolle spielen. Um die verschiedenen Aufgaben in jeder Umgebung und bei unterschiedlichen Licht- und Wetterverhältnissen zuverlässig erfüllen zu können, benötigen sie nicht nur eine gute Bildverarbeitungssoftware, sondern vor allem auch zuverlässige Kameras. Der Einsatz solcher Kamerasysteme wird auf zukünftigen Robotern sehr vielfältig sein - von 3D- bis Multispektralkameras. Das Team Rowesys wird auch in Zukunft insbesondere an intelligenten, kamerabasierten Lösungen arbeiten und mit innovativen Technologien zu einer nachhaltigeren und effizienteren Landwirtschaft beitragen. Ade Unkraut! Tschüss Herbizide! Hallo Umwelt!
GigE uEye FA - stark und robust

- Modell: GV-5040FA
- Interface: Ethernet
- Sensortyp: CMOS
- Hersteller: Sony
- Framerate: 78,0 fps
- Auflösung: 1,58 MPixel
- Shutter: Global-Shutter
- Sensorformat: 1456 mm x 1088 mm
- Maße : 41,0 mm x 53,0 mm x 42,7 mm
- Gewicht: 173g
- Anschluss: GigE M12, verschraubbar
- Anwendungen: Industrielle Bildverarbeitung, Maschinenbau, Messtechnik, Oberflächeninspektion, Logistik, Fabrik- und Prozessautomation, u.v.m.
Kunde
Rowesys - Robotic Weeding System - ist ein Studentenprojekt, das sich zum Ziel gesetzt hat, den übermäßigen Einsatz von Herbiziden zu reduzieren. Um diese Vision zu verwirklichen, hat sich an der ETH Zürich ein Team von zehn hoch motivierten Studierenden, acht fachkundigen Coaches und unterstützenden Sponsoren zusammengefunden. Gemeinsam entwickelten sie einen autonomen Unkrautbekämpfungsroboter, der mithilfe visueller Sensoren Unkraut erkennt und vernichtet. Das Ergebnis? Ein benutzerfreundliches und zeitsparendes Unkrautbekämpfungssystem.
https://rowesys.ethz.ch/